Michael EvansI'm a computer engineering graduate research assistant in the Vision Lab working under Dr. Khan Iftekharuddin. Previously at Old Dominion University I worked on a project involving large language models on the task of scientific claim verification, where I was advised by Dr. Jian Wu as part of the WS-DL research group. At Lawrence Tech and Michigan State University I worked on a joint research project on developing self-drive algorithms for electric vehicles and designed a V2X software architecture as part of the CS & AI Robotics Lab. Co-advised by Dr. CJ Chung and Dr. Josh Siegel. |

|
ResearchMy current research area consists of deep learning, computational neuroimaging, and computer vision. |
|
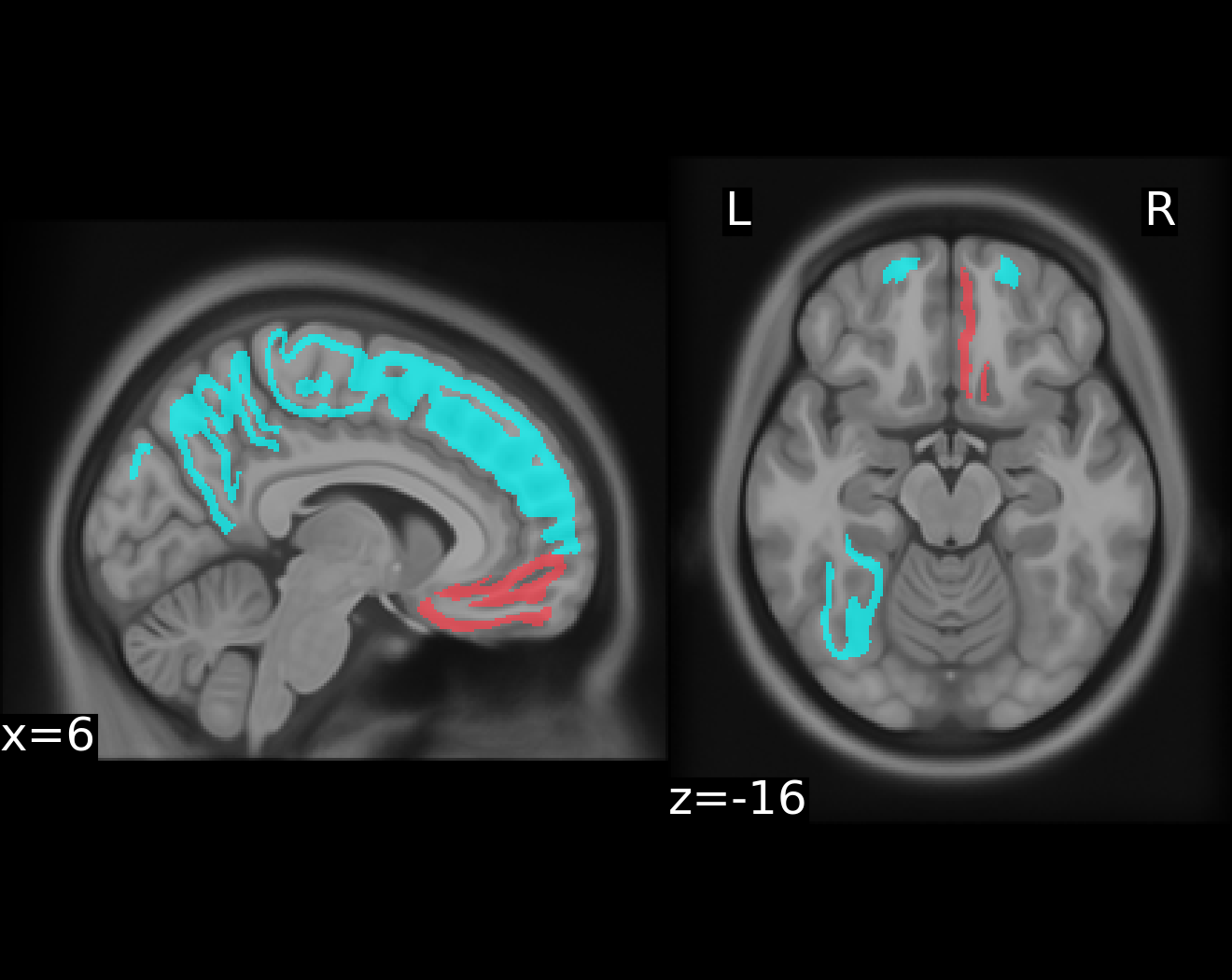
Machine Learning-Enhanced Non-Amnestic Alzheimer's Disease Diagnosis From MRI and Clinical FeaturesMegan A. Witherow, Michael Evans, Ahmed Temtam, Hamid Okhravi, and Khan M. Iftekharuddin Brain (target), 2025, [Preprint] |
|
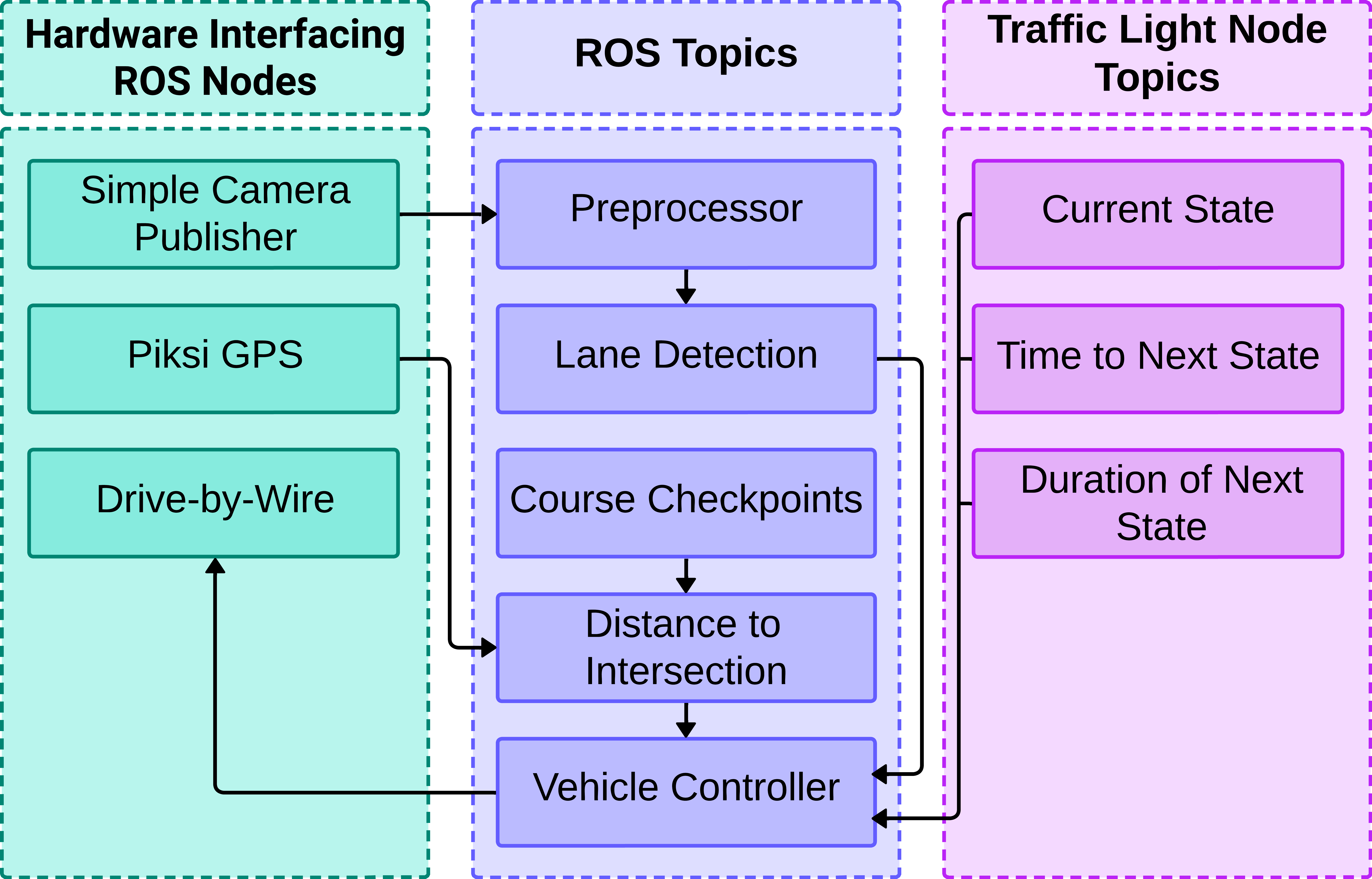
A Roadside Unit for Infrastructure Assisted Intersection Control of Autonomous VehiclesM. Evans, M. Machado, R. Johnson, L. Escamilla, A. Vadella, B. Froemming-Aldanondo, T. Rastoskueva, M. Jostes, D. Butani, R. Kaddis, C. Chung, and J. Siegel IEEE EIT, 2025, [Paper] code / video / paper / slides / pdf / Designed a V2X wireless communication architecture with a roadside unit capable of dynamically adjusting vehicle speed in response to traffic states. |

|
Evaluating Low-Resource Lane Following Algorithms for Compute-Constrained Automated VehiclesB. Froemming-Aldanondo, T. Rastoskueva, M. Evans, M. Machado, A. Vadella, L. Escamilla, R. Johnson, M. Jostes, D. Butani, R. Kaddis, C. Chung, and J. Siegel IEEE AIRC, 2025, [Paper] code / video / paper / slides / pdf / Developed 5 lane-following algorithms using ROS, Scikit-learn, and OpenCV, tested on 2 GEM electric vehicles. |

|
MSVEC: A Multidomain Testing Dataset for Scientific Claim VerificationMichael Evans, Dominik Soós, Ethan Landers, Jian Wu ACM MobiHoc, 2023, [Paper] code / paper / slides / pdf / Built a dataset of 200 scientific news claims and accompanying research papers and tested it against the gpt-3.5-turbo model on the task of scientific claim verification. |
Other ProjectsThese include coursework, side projects and unpublished research work. |

|
Poisonous vs Edible Mushroom ClassificationMichael Evans and Grant Fitch CS 422 Introduction to Machine Learning Term Project, 2024, [Project] code / slides / pdf / Trained a gradient boosting classifier model on 47,051 samples to perform binary classification on numerical mushroom data. Achieved a precision, recall, and F1 score of 0.99 through hyperparameter tuning and 5-fold cross validation. |
|
MARCBot IVMichael Evans ODU Vision Lab, 2024, [Project] video / slides / Applied model fine-tuning to the VGG16 convolutional neural network (CNN) for target identification with MARCBot IV: a surveillance robot capable of identifying, tracking, and following individuals with PyTorch. Improved the motion planning algorithm in MATLAB for target following through tight, cluttered environments, enabling safe indoor operation previously limited to outdoor use. |
|
Design and source code from Leonid Keselman's Jekyll fork of Jon Barron's website |